


{kind=link}
We’ve all seen the computer-generated mock-ups of future cities, with autonomous vehicles moving people and goods where they need to go. What doesn’t usually get mentioned, is that some of the essential enabling technology isn’t yet ready. In-vehicle positioning tech is a prime example – and one where u-blox recently undertook ground-breaking research to move things forward.
The challenge
To have truly autonomous vehicles on our streets – that’s those at the higher end of the Society of Automotive Engineers’ six-level automation scale – vehicles must be able to pinpoint their location to within centimeters, at all times.




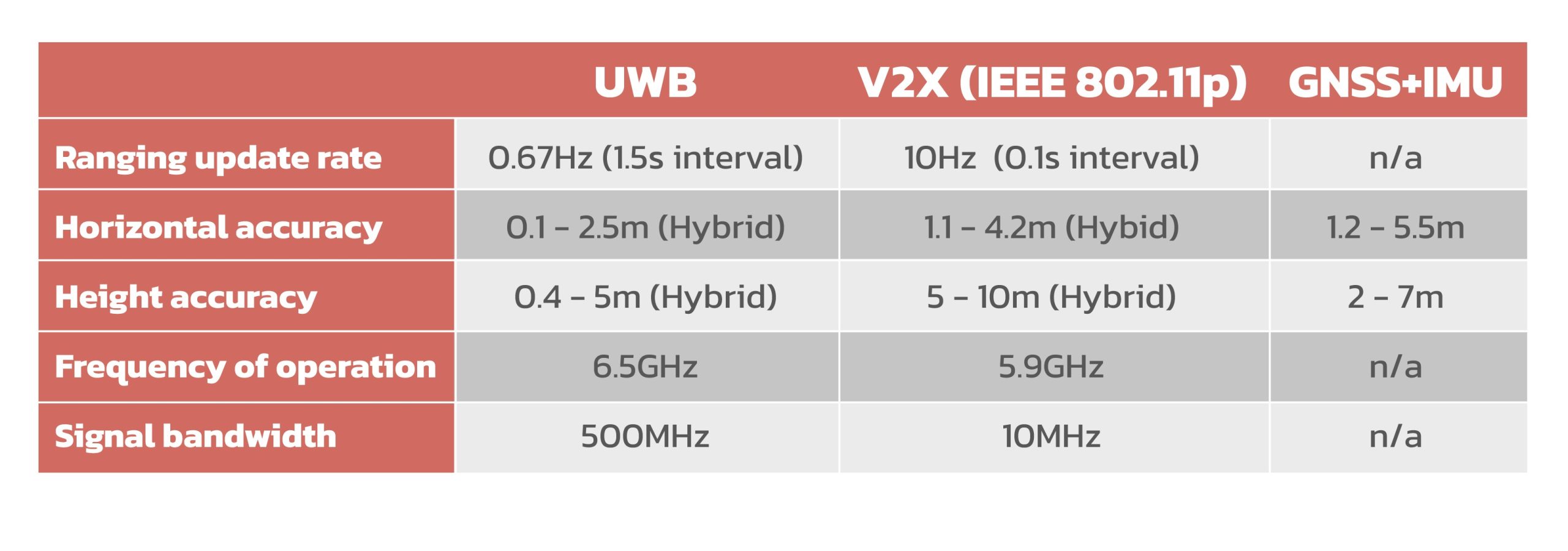
Current in-vehicle positioning technology, typically consisting of a global navigation satellite system (GNSS) receiver, plus an inertial measurement unit (IMU) and odometer, can’t get close to this. Even in the most favorable conditions for GNSS reception, you’re looking at between 2m and 5m horizontal CEP without a correction service. And it gets worse in challenging environments, such as urban areas or parking garages.
Today, there’s no single technology capable of delivering the required precision in all locations, meaning that tomorrow’s autonomous vehicles will require a blend of technologies, working together to provide the necessary accuracy, wherever the vehicle is.
Using terrestrial radio technologies for vehicle positioning
Engineers familiar with cellular vehicle-to-everything (C-V2X), IEEE 802.11p V2X and its successor 802.11bd, and ultra-wideband (UWB), will know they can be used for short-range distance measurements. Yet relatively little research has been done when it comes to combining these technologies with GNSS and IMUs to enhance positioning accuracy.
That’s why u-blox set out to evaluate the terrestrial ranging pros and cons of UWB and 802.11p V2X as part of hybrid solutions with GNSS for automotive navigation.
The aims were to establish whether these technologies were feasible for this purpose, and pinpoint where additional R&D needs to happen before this type of navigation system can enter the mainstream.
How terrestrial ranging systems work
To use 802.11p V2X or UWB to support vehicle positioning, you need a network of fixed ground stations, often referred to as ‘roadside units’ or ‘RSUs’. These are at known locations. Vehicles send signals over either V2X or UWB, which are returned by the RSUs. By measuring the signal’s roundtrip time, the vehicle can calculate the distance between itself and the ground station. Do this for at least three RSUs, and provided these are geometrically dispersed in relation to the vehicle, you can determine its position.
What we discovered
Our research enabled us to compare the performance of GNSS+UWB and GNSS+IEEE 802.11p with a conventional GNSS+IMU setup. It also demonstrated that it’s possible to build a hybrid filter to process the signals from the UWB, V2X, and GNSS systems, and handle the transition between areas with GNSS only and terrestrial ranging only.
GNSS + 802.11p V2X hybrid positioning performance
The hybrid GNSS+IEEE 802.11p V2X solution delivered performance similar to what you can achieve with a traditional GNSS+IMU (DR) setup, using standard positioning.
That’s not to say this technology would add no value to autonomous vehicles. In locations where GNSS reception is absent or severely degraded, IMU performance also drops off, because it needs continuous GNSS reception to remain aligned. In these scenarios, a V2X-based positioning solution could add value for navigation guidance.
For this to happen, the engineering community will need to undertake further research, including into the role the IMU can play in high-accuracy, high-integrity positioning, if the hybrid solution is to deliver both the accuracy and integrity demanded by autonomous vehicles.
GNSS + UWB hybrid positioning performance
The hybrid GNSS+UWB system delivered noticeably better performance, getting close to the levels you can achieve with an RTK-based GNSS augmentation service. Our test setup ran at 0.67 Hz, and achieved precision close to 10cm, though we’d expect production systems to align with the 10 Hz refresh rate typically used in V2X.
Our findings suggest that a 10 Hz UWB ranging system, coupled with a high-accuracy GNSS solution using correction data, could achieve 10cm accuracy in the majority of situations. With GNSS-plus-correction-data already proven to achieve this level of precision on motorways and in open areas, a UWB-based system could complement high-accuracy GNSS where satellite reception is challenging.
The hurdles here are around the limited range of UWB, and current regulatory restrictions around its use outdoors. However, it would be a good fit for micro-navigation in indoor areas, such as parking garages.
Next steps
These results are tremendously exciting, in that both hybrid solutions we tested show promise for use in autonomous vehicles.
A number of things will need to happen, of course, to turn this potential into production-ready technology. Regulatory changes and widespread deployment of UWB-enabled RSUs, more spectrum and wider channels for V2X, and the incorporation of positioning primitives and signals into V2X standards, are just some of the areas where development is needed.
Courtesy: u-blox